
Nieuwe voertuigeisen: volle vaart vooruit?
Mr. dr. Nynke E. Vellinga *
Op 6 juli jl. trad de Europese General Safety Regulation, ook wel Algemene Veiligheidsverordening genoemd, in werking.1) Deze Verordening introduceert – deels ingrijpende – nieuwe voertuigeisen die zich, via de Europese type-goedkeuring, zullen doen gelden op de Nederlandse openbare weg. Een aantal opvallende nieuwe voertuigeisen zullen hieronder, na een korte algemene beschouwing, worden besproken. Het gaat daarbij om de eisen aan de bestuurdermonitoringssystemen, de event data recorder, maatregelen ten aanzien van cybersecurity en de toelating van twee technologieën die een stap richting autonoom rijden zetten.
General Safety Regulation voor meer verkeersveiligheid
Onlangs zette Vink in dit tijdschrift het EU beleid voor veiligheid op de weg uiteen.2) Vink gaat daarbij uitgebreid in op Vision Zero, de visie van de EU om het aantal verkeersdoden tot (bijna) nul terug te brengen. DE EU geeft zichzelf daarvoor tot 2050 de tijd.3) De General Safety Regulation (hierna: GSR) kan in dit kader worden geplaatst. Om een type-goedkeuring voor een nieuw motorrijtuig te verkrijgen, zal dit voertuig aan de eisen gesteld in de GSR moeten voldoen.4) De GSR en de daarin opgenomen nieuwe voertuigeisen hebben dus grote impact op nieuwe motorrijtuigen die over de wegen van de EU rijden. Door middel van nieuwe voertuigtechnologieën zal de GSR naar verwachting bijdragen aan de verkeersveiligheid:
‘De Unie moet alles in het werk stellen om ongevallen en verwondingen in het wegvervoer te verminderen of uit te bannen. Daarom zijn er niet alleen veiligheidsmaatregelen nodig om de inzittenden van voertuigen te beschermen, maar moeten er ook concrete maatregelen worden getroffen ter voorkoming van doden en gewonden onder kwetsbare weggebruikers, zoals fietsers en voetgangers, teneinde de weggebruikers die zich buiten de voertuigen bevinden te beschermen.'5)
Dit gebeurt op verschillende manieren: het veiliger maken van het voertuig zelf (bijv. achteruitrijdetectie en het stellen van eisen aan de cybersecurity), het bij de les houden van de bestuurder of het compenseren van zijn tekortkomingen (door bestuurdermonitoringssystemen en autonome rijtechnologie), en het bijdragen aan ongevalsreconstructie (met behulp van de gegevens van een zogeheten event data recorder). Hieronder zullen, na een korte algemene beschouwing, de event data recorder en de bestuurdermonitoringssystemen, de maatregelen ten aanzien van de cybersecurity en twee nieuwe technologieën die autonoom rijden een stap dichterbij brengen worden besproken. Hierbij worden uitdagingen en mogelijke tekortkomingen aangekaart om vervolgens ook oplossingsrichtingen te bespreken. Dus, volle vaart vooruit naar Vision Zero?
Nieuwe voertuigeisen
De GSR is van toepassing op voertuigen van de categorieën M, N en O.6) Daarbij gaat het bijvoorbeeld om personenauto’s, bedrijfswagens en vrachtwagens. Daarnaast ziet de GSR ook op de systemen, onderdelen en technische eenheden die voor deze voertuigen worden ontworpen en gebouwd.7) Vele voertuigeisen gelden voor alle hiergenoemde voertuigcategorieën, een aantal voertuigeisen gelden slechts ten aanzien van specifieke voertuigcategorieën. Zo vereist de GSR de aanwezigheid van een aantal geavanceerde voertuigsystemen voor voertuigen van alle voertuigcategorieën:
‘De motorvoertuigen worden uitgerust met de volgende geavanceerde voertuigsystemen:
a) intelligente snelheidsondersteuning;
b) ondersteuning van de installatie van een alcoholslot;
c) vermoeidheids- en aandachtswaarschuwing;
d) geavanceerde afleidingswaarschuwing;
e) noodstopsignaal;
f) achteruitrijdetectie, en
g) gegevensrecorder voor incidenten.’
In aanvulling daarop dienen de voertuigen van de categorieën M1 en N1 ook te worden uitgerust met onder meer een noodremsysteem (art. 7 lid 2 GSR) en een grotere botsbeschermingszone voor het hoofd om kwetsbare weggebruikers beter te beschermen (art. 7 lid 5). Bovendien stelt de GSR eisen aan de inrichting van (deels) geautomatiseerde voertuigen:
‘1. Geautomatiseerde voertuigen en volledig geautomatiseerde voertuigen moeten behalve aan de andere voorschriften van deze verordening en de op grond daarvan vastgestelde gedelegeerde en uitvoeringshandelingen die van toepassing zijn op voertuigen van de betrokken categorieën, ook voldoen aan de technische specificaties die zijn uiteengezet in de in lid 2 bedoelde uitvoeringshandelingen die betrekking hebben op:
a) systemen die dienen om de besturing van het voertuig, met inbegrip van signaleren, sturen, versnellen en remmen, door de bestuurder te vervangen;
b) systemen die dienen om aan het voertuig realtime informatie te geven over de toestand van het voertuig en de omgeving;
c) controlesystemen voor bestuurderbeschikbaarheid;
d) gegevensrecorders voor incidenten voor geautomatiseerde voertuigen;
e) een geharmoniseerd formaat voor de uitwisseling van gegevens, bijvoorbeeld voor vehicle platooning met voertuigen van verschillende merken;
f) systemen om veiligheidsinformatie te verstrekken aan andere weggebruikers.
Deze in de eerste alinea, onder c), bedoelde technische specificaties in verband met controlesystemen voor bestuurderbeschikbaarheid gelden echter niet voor volledig geautomatiseerde voertuigen.’8)
Net als in art. 6 (vermoeidheids- en aandachtswaarschuwing; geavanceerde afleidingswaarschuwing) wordt ook hier met de ‘controlesystemen voor bestuurderbeschikbaarheid’ een middel geïntroduceerd om vast te stellen dat de bestuurder doet wat hij moet doen: heeft hij de aandacht bij de weg, blijft hij wel wakker, zit de bestuurder klaar om het stuur over te nemen? Tezamen met de invoering van de gegevensrecorder voor incidenten of ‘event data recorder’ (hierna: EDR) lijkt een botsing met het gegevensbeschermingsrecht onontkoombaar.
De gegevensrecorder voor incidenten (EDR) en gegevensbescherming
Bestuurdermonitoring en de EDR
De systemen die zien op de vermoeidheids- en aandachtswaarschuwing en geavanceerde afleidingswaarschuwing, kortweg bestuurdermonitoringssystemen, worden in de GSR gedefinieerd.9) Bij het systeem dat een ‘vermoeidheids- en aandachtswaarschuwing’ geeft gaat het om ‘een systeem dat de alertheid van de bestuurder beoordeelt door de voertuigsystemen te analyseren en dat de bestuurder zo nodig waarschuwt’ (art. 3 lid 5 GSR). Hoe dit in de praktijk verschilt van het systeem dat voorziet in de ‘geavanceerde afleidingswaarschuwing’ wordt niet duidelijk uit de definities. De ‘geavanceerde afleidingswaarschuwing’ draagt gezien de definitie eveneens bij tot de alertheid van de bestuurder:
‘“geavanceerde afleidingswaarschuwing”: een systeem dat de bestuurder helpt om alert te blijven met betrekking tot de verkeerssituatie en dat de bestuurder waarschuwt zodra hij afgeleid raakt; (...)’10)
Het controlesysteem voor bestuurderbeschikbaarheid is duidelijk toegesneden op gebruik in een geautomatiseerd voertuig:
‘“controlesysteem voor bestuurderbeschikbaarheid”: een systeem dat controleert of de bestuurder in staat is de rijfunctie in bepaalde situaties van een geautomatiseerd voertuig over te nemen, indien dit passend is; (...)’11)
Deze bestuurdermonitoringssystemen zouden in de praktijk de vorm kunnen krijgen van camera’s die gericht zijn op de bestuurder en bijvoorbeeld zijn oogbewegingen monitoren.12) Zijn de ogen gesloten, dan volgt er een waarschuwing. Zijn de ogen niet gericht op de weg, maar blijft de blik van de bestuurder rusten op een mobiele telefoon, dan volgt eveneens een waarschuwing. Er zou dan bijvoorbeeld een signaal kunnen klinken, of de bestuurderstoel zou kunnen gaan schudden. Er valt ook te denken aan het registreren van de hartslag van de bestuurder door sensoren in het stuur. Wanneer de hartslag verandert, is dat wellicht het teken dat de bestuurder in slaap sukkelt.13) Wordt er überhaupt geen hartslag geregistreerd, dan ligt het voor de hand dat de bestuurder zijn handen niet langer aan het stuur heeft. De hierboven genoemde systemen zullen dan een waarschuwing afgeven. Dit zou de verkeersveiligheid ten goede moeten komen.
Dit alles lijkt nogal ingrijpend, zeker wanneer de EDR de verzamelde gegevens ook nog opslaat. Beelden van hetgeen zich in het motorrijtuig afspeelt, kunnen daarmee toegankelijk worden voor anderen dan de bestuurder. Denk daarbij aan de monteur van de garage, de autofabrikant, de politie, de verzekeraar van de auto of een hacker. Het registreren van deze gegevens en het delen daarvan stuit daarmee op vragen vanuit het perspectief van de gegevensbescherming.
Gegevensbescherming
De Europese wetgever heeft complicaties van gegevensbeschermingsrechtelijke aard voorzien en in de GSR meerdere bepalingen opgenomen om de privacy en de bescherming van gegevens van bestuurders te waarborgen. In de definitie van EDR ligt reeds een beperking besloten:
‘“gegevensrecorder voor incidenten”: een systeem dat uitsluitend tot doel heeft kritische botsinggerelateerde parameters en informatie kort vóór, tijdens en onmiddellijk na een botsing te registreren en op te slaan; (...)’14)
Niet alles hoeft dus te worden geregistreerd en te worden opgeslagen door de EDR; alleen kritische botsinggerelateerde parameters en informatie die betrekking hebben op een korte periode na een botsing mogen worden opgeslagen. In dit verband moet worden benadrukt dat het gaat om een periode rondom een botsing, informatie over andere incidenten (bijv. verkeersovertredingen of zogeheten near-misses) hoeven niet te worden geregistreerd en opgeslagen. Hoeveel seconden, minuten of uren een periode ‘kort vóór, tijdens en onmiddellijk na een botsing’ duurt, wordt in de GSR niet nader uitgewerkt.15) Uit de preambule blijkt dat het registreren en opslaan van de relevante parameters en informatie zou kunnen worden gestart op het moment dat de airbag afgaat.16) De Europese wetgever licht toe wat het verstaat onder kritische botsinggerelateerde parameters en informatie: uit art. 6 lid 4 sub a volgt dat het gaat om onder meer gegevens over de snelheid, de positie en de overhelling van het voertuig, de activering van de veiligheidssystemen van het voertuig en de relevante inputparameters van de systemen voor actieve veiligheid en ongevalpreventie aan boord van het voertuig’.17) In deze context kan worden gesteld dat de systemen voor bestuurdermonitoring systemen zijn ter preventie van ongevallen, en de door deze systemen verzamelde gegevens belangrijk zijn met het oog op toekomstige ongevalspreventie, wat betekent dat hun gegevens kunnen worden opgeslagen door de EDR. Uit de preambule van de GSR blijkt dat de systemen voor bestuurdermonitoring niet continu gegevens mogen opslaan of bewaren, hetgeen wordt herhaald in art. 6 lid 3.18) Artikel 6 lid 3 GSR biedt echter een uitzondering op deze hoofdregel: ‘de systemen voor vermoeidheids- en aandachtswaarschuwing of geavanceerde afleidingswaarschuwing worden op zodanige wijze ontworpen dat zij niet continu gegevens opslaan of bewaren, behalve die gegevens die noodzakelijk zijn voor de doeleinden waarvoor ze opgeslagen of anderszins verwerkt worden binnen het systeem met een gesloten circuit [cursivering NEV].’ De EDR kan worden aangemerkt als zo’n systeem met gesloten circuit (art. 6 lid 4 sub c onder i GSR). Deze gegevens, waarbij mogelijk beelden zijn van de inzittenden, dienen wel te worden beschermd.
Zo volgt uit de preambule van de GSR dat de verwerking van persoonsgegevens dient plaats te vinden in overeenstemming met de Algemene Verordening gegevensbescherming (AVG).19) Opvallend is dat in dezelfde overweging uit de preambule is te lezen dat EDRs ‘moeten functioneren met een systeem met gesloten circuit, waarbij de opgeslagen gegevens overschreven worden; het systeem mag bovendien geen identificatie van het voertuig of de bezitter mogelijk maken’. Artikel 6 lid 4 sb c onder ii GSR schrijft voor dat de verzamelde gegevens geanonimiseerd moeten zijn. Omdat identificatie niet mogelijk dient te zijn, is de AVG echter niet van toepassing op deze gegevens.20) Overweging 26 van de Preambule van de AVG stelt immers:
‘De gegevensbeschermingsbeginselen dienen derhalve niet van toepassing te zijn op anonieme gegevens, namelijk gegevens die geen betrekking hebben op een geïdentificeerde of identificeerbare natuurlijke persoon of op persoonsgegevens die zodanig anoniem zijn gemaakt dat de betrokkene niet of niet meer identificeerbaar is. Deze verordening heeft derhalve geen betrekking op de verwerking van dergelijke anonieme gegevens, (...).’
De inspanningen om tot gegevensbescherming te komen in de GSR leiden dus tot een discrepantie.21) De zaken lijken hierdoor onnodig ingewikkeld te zijn gemaakt; een verwijzing naar de AVG is onnodig waar het geanonimiseerde gegevens betreft en de toepasselijkheid van de AVG op persoonsgegevens die worden opgeslagen door de EDR staat ook zonder vermelding van de AVG in de GSR buiten kijf.
Daarnaast biedt de GSR weinig duidelijkheid omtrent het delen van de verzamelde gegevens. Weliswaar bepaalt art. 6 lid 4 sub d GSR dat gegevens opgeslagen op de EDR ter beschikking mogen worden gesteld aan nationale autoriteiten voor (uitsluitend) ongevallenanalyse – overweging 13 uit de preambule lijkt dit te onderstrepen22) – maar ten aanzien van de gegevens verzameld door systemen voor vermoeidheids- en aandachtswaarschuwing en geavanceerde afleidingswaarschuwing bepaalt art. 6 lid 3 GSR dat deze gegevens ‘op geen enkel moment toegankelijk [worden; NEV] gemaakt voor of ter beschikking [worden; NEV] gesteld aan derde partijen, en worden zij onmiddellijk na verwerking verwijderd.’ Dit roept de vraag op of hiermee de mogelijkheid van ongevallenanalyse niet (te) zeer wordt beperkt.23)
Cybersecurity
Cybersecurity als element van voertuigveiligheid
Zoals hieronder nader uiteengezet zal worden, worden auto’s in toenemende mate geautomatiseerd. Hierdoor zal ook de communicatie met andere voertuigen en elementen van de infrastructuur (bijv. met zogeheten slimme stoplichten) naar verwachting toenemen.24) Die communicatiemogelijkheden hebben een keerzijde: ook kwaadwillenden25) zouden hierdoor toegang tot het systeem van de auto kunnen verkrijgen. De impact hiervan kan groot zijn, zeker wanneer een vloot autonome voertuigen gehackt wordt, een gehackte auto gebruikt wordt bij een terroristische aanslag of wanneer een gehackte auto wordt ingezet bij een gijzeling. Reeds in 2015 bracht tijdschrift Wired tezamen met twee hackers aan het licht dat het mogelijk was om toegang te verwerven tot de veiligheidskritische systemen van de auto via een hack van het entertainmentsysteem van de Jeep.26) De hackers konden zo de auto tot stilstand brengen midden op de weg, de deuren van de auto vergrendelen en in bepaalde omstandigheden ook de rem uitschakelen en de stuurinrichting bedienen.27) De Europese wetgever heeft deze cybersecurityrisico’s onder ogen gezien, en zoekt op dit gebied in de GSR aansluiting bij de koers uitgezet door het ‘World Forum for Harmonization of Vehicle Regulations (WP.29)’ van de Verenigde Naties:
‘De mogelijkheid om zonder toestemming toegang te krijgen tot de in het voertuig aanwezige gegevens en de software langs draadloze weg illegaal aan te passen, neemt toe als gevolg van de connectiviteit en automatisering van voertuigen. Om dergelijke risico's tegen te gaan, dienen VN-reglementen of andere reguleringsbesluiten inzake cyberveiligheid verplicht te worden toegepast zo spoedig mogelijk na de inwerkingtreding ervan.’28)
WP.29 heeft twee van deze reglementen recentelijk aangenomen: VN Reglement 155 en Reglement 156. Deze reglementen zijn inwerking getreden en zijn nu, door de GSR, tot voorwaarden geworden voor het verkrijgen van typegoedkeuring van motorrijtuigen.29) Een type auto zal niet worden goedgekeurd indien de fabrikant niet beschikt over een ‘Certificate of Compliance for Cyber Security Management System’30) en een ‘Certificate of Compliance for Software Update Management System’.31) Ter verkrijging van deze certificaten dient de fabrikant een reeks documenten aan te leveren waarin onder meer het Cyber Security Management System en het Software Update Management System van de fabrikant worden omschreven.32) De beide VN reglementen zetten uiteen hoe deze systemen eruit dienen te zien. Het Cyber Security Management System ziet op drie fasen: ‘(a) Development phase; (b) Production phase; (c) Post-production phase.’33) Gedurende die fasen dient het systeem zo te zijn ingericht dat er bijvoorbeeld processen zijn om cybersecurity te ‘managen’ (art. 7.2.2.2 (a) UN R155), processen ter beoordeling, categorisering en aanpak van geïdentificeerde risico’s (art. 7.2.2.2 (c) UN R155), en processen voor het testen van de cybersecurity van het type voertuig (art. 7.2.2.2 (e) UN R155). Het valt op dat hier processen worden beschreven en geen concrete voertuigeisen worden gesteld. Voor het Software Update Management System geldt dat er ook een sterke nadruk ligt op processen: processen om vast te stellen dat het voertuig en de software-update compatibel zijn (art. 7.1.1.6 UN R156), processen om vast te stellen en vast te leggen of een software typegoedgekeurde systemen zal beïnvloeden (art. 7.1.1.8 UN R156), en bijvoorbeeld ook een proces om de gebruiker van het voertuig op de hoogte te stellen van de update (art. 7.1.1.11 UN R156). Met de komst van de beide UN reglementen wordt onderstreept hoezeer cybersecurity een kwestie van voertuigveiligheid en verkeersveiligheid is.
Afdoende maatregelen?
Hoezeer de komst van UN R155 en R156 en de opname van deze eisen in de GSR ook zijn toe te juichen, beide reglementen hebben hun tekortkomingen.34) Opvallend is dat beide reglementen deel uitmaken van een serie technische voertuigvoorschriften, maar in wezen geen technische voertuigeisen stellen. De reglementen voorzien in processen die fabrikanten dienen te hebben ingericht om het veilig, ‘cybersecure’, functioneren van het motorrijtuig te faciliteren. Er wordt weliswaar gesteld dat de fabrikant maatregelen dient te nemen om ‘[to; NEV] detect and respond to possible cyber security attacks’, maar hoe het motorrijtuig dient te worden ingericht om dit mogelijk te maken, wordt in het midden gelaten.35) Voorschriften rondom bijvoorbeeld de isolatie van veiligheidskritische systemen van niet-veiligheidskritische systemen (zoals het entertainmentsysteem) worden niet door de UN reglementen gegeven. Enerzijds zou men kunnen betogen dat dit positief is, omdat zo de fabrikant ruimte wordt gegeven om het systeem van het motorrijtuig zo in te richten zoals dat vanuit zijn oogpunt het beste lijkt. Er is daarmee ruimte voor innovatie. Anderzijds worden geen minimumeisen vastgesteld, waardoor een fabrikant in de verleiding zou kunnen komen om niet te kiezen voor de vanuit cybersecurityperspectief meest gewenste inrichting van het systeem van het motorrijtuig. Voor een onderwerp dat zo cruciaal is en wordt voor voertuig- en verkeersveiligheid, lijkt een basisniveau van cybersecurity gepast.36) Cybersecurity is niet minder belangrijk dan bijvoorbeeld de remkracht of de stuurinrichting van een motorrijtuig.37)
ALKS en ADS
ALKS
De GSR zorgt voor de toelating van het gebruik van het Automated Lane Keeping System (ALKS) en koppelt het relevante VN Reglement (VN R157) aan de EU typegoedkeuring.38) Dit VN reglement zet uiteen wat een ALKS precies is en geeft technische eisen waaraan het systeem dient te voldoen. De definitie die in VN R157 voor ALKS wordt gegeven luidt als volgt:
‘“Automated Lane Keeping System (ALKS)" for low speed application is a system which is activated by the driver and which keeps the vehicle within its lane for travelling speed of 60 km/h or less by controlling the lateral and longitudinal movements of the vehicle for extended periods without the need for further driver input. (...)’
Het gaat daarmee om een meer geavanceerd systeem dan dat de term ALKS wellicht doet vermoeden: de ALKS bepaalt niet alleen de richting, maar ook de snelheid van het motorrijtuig. In UN R157 lijkt gesuggereerd te worden dat, wanneer de ALKS is ingeschakeld, de bestuurder zich mag wijden aan andere taken dan het besturen. Dit lijkt op gespannen voet te staan met de verplichtingen van de (feitelijke) bestuurder voortvloeiend uit het RVV 1990 en is moeilijk te rijmen met de invulling van het bestuurdersbegrip in de rechtspraak. Deze invulling houdt immers in dat iemand feitelijk bestuurder in de zin van art. 1 sub o WVW 1994 en art. 1 onder 1 RVV 1990 is indien hij:
1. een persoon van vlees en bloed is,
2. die richting en snelheid van het motorrijtuig bepaalt (of dat had behoren te doen),
3. door een of meerdere bedieningsorganen van het motorrijtuig te hanteren.39)
De ALKS maakt dat het tweede element, het bepalen van richting en snelheid, niet langer door de bestuurder wordt gedaan. Daarmee heeft degene die vóór het inschakelen van de ALKS nog als feitelijk bestuurder was aan te merken, niet langer die hoedanigheid na het inschakelen van de ALKS. De ALKS zelf kan ook niet worden aangemerkt als feitelijk bestuurder: de ALKS is geen persoon, geen mens van vlees en bloed. Het bestuurdersbegrip neemt echter in met name het RVV 1990 zo’n centrale plaats in, dat er zonder bestuurder onoverkomelijkheden ontstaan. Op het eerste gezicht sluit de afwezigheid van een bestuurder bovendien niet langer aan bij het door Nederland ondertekende Verdrag van Wenen,40) waarvan art. 8 lid 1 luidt:
‘Every moving vehicle or combination of vehicles shall have a driver.’
Recentelijk is er echter een artikel aan het Verdrag van Wenen toegevoegd. Dit art. 34bis ziet specifiek op ‘automated driving’:
‘The requirement that every moving vehicle or combination of vehicles shall have a driver is deemed to be satisfied while the vehicle is using an automated driving system which complies with:
a) domestic technical regulations, and any applicable international legal instrument, concerning wheeled vehicles, equipment and parts which can be fitted and/or be used on wheeled vehicles, and
b) domestic legislation governing operation.
The effect of this Article is limited to the territory of the Contracting Party where the relevant domestic technical regulations and legislation governing operation apply.’
Landen die zijn aangesloten bij het Verdrag van Wenen wordt op deze manier de vrijheid gegeven om zelf een juridisch kader te ontwikkelen voor autonoom rijden. Zo hebben Duitsland en Frankrijk bijvoorbeeld al wetgeving met betrekking tot het gebruik van een autonoom voertuig, en daarnaast ook voor de ALKS.41) Het staat Nederland eveneens vrij eigen verkeerswetgeving te introduceren ten aanzien van de ALKS en geavanceerdere voertuigtechnologie voor autonoom rijden.
Voor de ALKS kan door de Nederlandse wetgever de oplossing gezocht worden in het begrip ‘juridisch bestuurder’. Naast een feitelijk bestuurder kent het wegenverkeersrecht immers ook nog een juridisch bestuurder: degene die onder bij algemene maatregel van bestuur bepaalde voorwaarden ‘wordt geacht het motorrijtuig onder zijn onmiddellijk toezicht te doen besturen’ (art. 1 WVW 1994) wordt door wetsduiding aangemerkt als juridisch bestuurder.42) De in art. 1 WVW 1994 bedoelde AMvB is het RVV 1990, dat kortgezegd bepaalt dat de rijinstructeur en de rijexaminator juridisch bestuurder zijn (art. 1 onder 2 RVV 1990). Deze begripsbepaling zou kunnen worden uitgebreid om ook degene die de ALKS inschakelt als juridisch bestuurder aan te merken. Deze persoon zal dan echter wel ‘onmiddellijk toezicht’ dienen uit te oefenen op het motorijtuig met ingeschakelde ALKS.43)
Hoewel deze benadering een snelle oplossing biedt ten aanzien van de toelating van de ALKS, biedt deze geen soelaas ten aanzien van het geavanceerdere Automated Driving System (ADS). De ADS wordt eveneens door de GSR op Europese wegen toegelaten.44)
ADS
De ADS gaat in voertuigautomatisering nog weer een stap verder dan de ALKS. In de Uitvoeringsverordening wordt ADS als volgt gedefinieerd:
‘“systeem voor geautomatiseerd rijden”: de hardware en software die gezamenlijk in staat is de volledige dynamische rijtaak onafgebroken te verrichten in een specifiek operationeel ontwerpdomein.’45)
Het operationeel ontwerpdomein wordt gevormd door de omstandigheden waaronder de ADS naar zijn ontwerp moet kunnen functioneren.46) De term ‘dynamische rijtaak’ ziet op alle functies die nodig zijn om het motorrijtuig te bedienen, maar omvat niet de reisplanning en de selectie van de bestemming.47) Met andere woorden: de ADS dient de rijtaak van de conventionele feitelijk bestuurder volledig te kunnen overnemen binnen de daarvoor geschikte omstandigheden.48) Daarbij kan gedacht worden aan een zelfrijdend busje dat over een universiteitscampus rijdt, maar bijvoorbeeld ook aan een busje waarbij de ADS de rijtaak op de snelweg overneemt van de conventionele, feitelijke bestuurder.49) Van enige vorm van toezicht is geen sprake: de in art. 2 lid 24 en lid 25 Uitvoeringsverordening geïntroduceerde ‘bediener aan boord’ (‘on-board operator’)50) en ‘bediener voor interventie op afstand’ (‘remote intervention operator’)51) moeten ingrijpen wanneer zij daartoe worden opgeroepen door de ADS, maar zij besturen het motorrijtuig niet. Ook hoeven beide operators geen onmiddellijk toezicht te houden op het functioneren van de ADS of op het wegverkeer. Hun aanwezigheid is bovendien niet verplicht, een motorrijtuig met ingeschakelde ADS mag ook de weg op zonder een van deze operators, waardoor de uitbreiding van het juridisch bestuurdersbegrip zich niet leent als oplossing voor de afwezigheid van de bestuurder. Daarmee is een motorrijtuig met ingeschakelde ADS vanuit juridisch perspectief een driverless car te noemen.
Hoe nu verder? De bestuurder is een centrale rechtsfiguur in het Nederlandse wegenverkeersrecht, hij is normadressaat van vele verkeersregels. Een ‘quick fix’ zoals voor de ALKS lijkt daarmee uitgesloten te zijn. Een grotere revisie van de wegenverkeerswetgeving is dan ook onontkoombaar.
Daarbij kunnen verschillende keuzes worden gemaakt, zoals ook blijkt uit de diversiteit in benaderingen in de landen om ons heen.52) Zo heeft de Duitse wetgever ervoor gekozen om de rechtsfiguur van ‘Technische Aufsicht’ te introduceren53) en in het Verenigd Koninkrijk ligt er een advies voor de introductie van de rechtsfiguur van ‘user-in-charge’.54) Beide benaderingen bieden echter geen oplossing voor de afwezigheid van de bestuurder in de Nederlandse context. De Franse wetgever legt (bestuurs)strafrechtelijke aansprakelijkheid in art. L123-2 bij de fabrikant van het motorrijtuig voor strafbare feiten gepleegd door de ingeschakelde ADS:
‘Pendant les périodes où le système de conduite automatisé exerce le contrôle dynamique du véhicule conformément à ses conditions d'utilisation, le constructeur du véhicule ou son mandataire, [...], est pénalement responsable des délits d'atteinte involontaire à la vie ou à l'intégrité de la personne prévus aux articles 221-6-1, 222-19-1 et 222-20-1 du code pénal lorsqu'il est établi une faute, au sens de l'article 121-3 du même code.
Sauf dans les cas prévus au 3° de l'article L. 123-1, lorsqu'une manoeuvre effectuée par le système de conduite automatisé exerçant le contrôle dynamique du véhicule conformément à ses conditions d'utilisation contrevient à des règles dont le non-respect constitue une contravention, le constructeur du véhicule ou son mandataire, [...], est redevable pécuniairement de l'amende encourue.’55)
De in dit tijdschrift eerder geopperde benadering, waarbij gepleit werd voor het vormgeven van de wegenverkeerswetgeving naar de benadering die is gebruikt in bijvoorbeeld het Binnenvaartpolitiereglement (BPR), zou hierop goed kunnen aansluiten.56) In het BPR hebben verkeersregels niet de bestuurder (of schipper) als normadressaat, maar het voertuig (of vaartuig) zelf. In aanvulling daarop is vastgelegd wie de persoon is die kan worden aangesproken voor de niet-naleving van deze regels. Deze benadering zou ook in de wegenverkeerswetgeving kunnen worden gehanteerd.
Afsluitende opmerkingen
De GSR brengt grote veranderingen teweeg in de voertuigtechnologie en daarmee in het verkeer op onze wegen. De verkeersveiligheid is de grote drijfveer voor deze veranderingen. Als de technologieën die worden geïntroduceerd door de GSR aan de verwachtingen voldoen, vormt de GSR een belangrijke stap in de invulling van de positieve verplichting die voortvloeit uit art. 2 EVRM. In de woorden van het EHRM:
‘Thus, in the context of road safety, the above-discussed positive duties of the domestic authorities entail, first, the obligation to have in place an appropriate set of preventive measures geared to ensuring public safety and minimising the number of road accidents (...)’57)
Vision Zero zou hiermee bovendien weer een stap dichter bij verwezenlijking kunnen komen. Dus volle vaart vooruit?
Er wordt in de GSR een grote stap gezet naar autonoom vervoer, maar het Nederlandse wegenverkeersrecht zal moeten worden aangepast om in de Europese pas te blijven lopen. En dat kost tijd. In juli 2022, vlak voordat de GSR in werking is getreden, schreef Minister Harbers aan de Tweede Kamer over de ADS: ‘Afhankelijk van de beleidskeuzes is de termijn waarop regelgeving zou kunnen worden aangepast minstens zes maanden (ministeriële regeling) tot twee jaar (wetswijziging).’58) Bovendien zijn er verbeteringsslagen ten aanzien van de regulering van de cybersecurity in motorrijtuigen te maken. Daarnaast is opheldering nodig ten aanzien van de in het voorgaande aangestipte gegevensbeschermingsrechtelijke vragen rond de event data recorder die inzicht moet geven in de oorzaken van ongevallen. Dus: vooruit, maar (vooralsnog) niet met volle vaart.
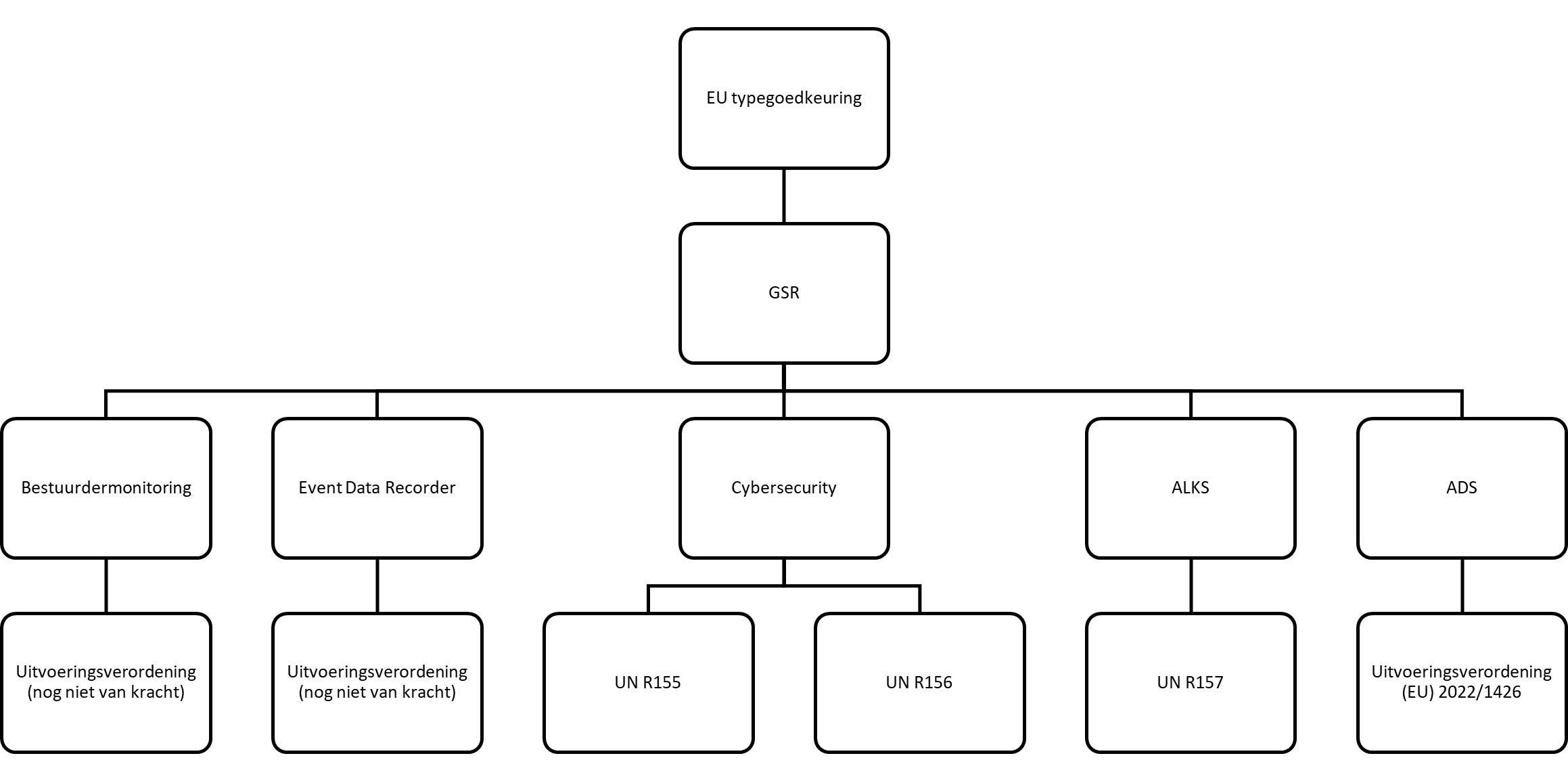
De auteur heeft voor de lezer het volgende overzicht gemaakt van de voor de GSR relevante wetgeving:
1. Verordening (EU) 2019/2144 van het Europees Parlement en de Raad van 27 november 2019 betreffende de voorschriften voor de typegoedkeuring van motorvoertuigen en aanhangwagens daarvan en van systemen, onderdelen en technische eenheden die voor dergelijke voertuigen zijn bestemd wat de algemene veiligheid ervan en de bescherming van de inzittenden van voertuigen en kwetsbare weggebruikers betreft, tot wijziging van Verordening (EU) 2018/858 van het Europees Parlement en de Raad en tot intrekking van de Verordeningen (EG) nr. 78/2009, (EG) nr. 79/2009 en (EG) nr. 661/2009 van het Europees Parlement en de Raad en de Verordeningen (EG) nr. 631/2009, (EU) nr. 406/2010, (EU) nr. 672/2010, (EU) nr. 1003/2010, (EU) nr. 1005/2010, (EU) nr. 1008/2010, (EU) nr. 1009/2010, (EU) nr. 19/2011, (EU) nr. 109/2011, (EU) nr. 458/2011, (EU) nr. 65/2012, (EU) nr. 130/2012, (EU) nr. 347/2012, (EU) nr. 351/2012, (EU) nr. 1230/2012 en (EU) 2015/166 van de Commissie.
2. Liesbeth J. Vink, ‘Naar nul. EU beleid voor veiligheid op de weg’, VR 2022/77.
3. Zie bijv. https://road-safety.transport.ec.europa.eu/index_en.
4. Art. 1 GSR, Verordening (EU) 2018/858 van het Europees Parlement en de Raad van 30 mei 2018 betreffende de goedkeuring van en het markttoezicht op motorvoertuigen en aanhangwagens daarvan en systemen, onderdelen en technische eenheden die voor dergelijke voertuigen zijn bestemd.
5. Overweging 3, preambule GSR.
6. Art. 2 GSR jo. art. 4 Verordening (EU) 2018/858.
7. Art. 2 GSR.
8. Art. 11 lid 1 GSR.
9. Zie ook Gedelegeerde Verordening (EU) .../... van de Commissie van 23.4.2021 tot aanvulling van Verordening (EU) 2019/2144 van het Europees Parlement en de Raad door de nadere voorschriften vast te stellen voor specifieke testprocedures en technische voorschriften voor de typegoedkeuring van motorvoertuigen met betrekking tot systemen voor vermoeidheids- en aandachtswaarschuwing ervan, en tot wijziging van bijlage II bij die verordening (nog niet van kracht).
10. Art. 3 lid 6 GSR.
11. Art. 3 lid 23 GSR.
12. Zie bijvoorbeeld C. Schwarz, J. Gaspar, T. Miller en R. Yousefian, ‘The detection of drowsiness using a driver monitoring system’, Traffic Injury Prevention 2019, DOI: 10.1080/15389588.2019.1622005 over de verschillende factoren die gebruikt kunnen worden om de bestuurder te monitoren.
13. Zie hierover bijvoorbeeld R. Buendia, F. Forcolin, J. Karlsson, B.A. Sjöqvist, A. Anund en S. Candefjord, ‘Deriving heart rate variability indices from cardiac monitoring – An indicator of driver sleepiness', Traffic Injury Prevention 2019, DOI: 10.1080/15389588.2018.1548766.
14. Art. 3 lid 13 GSR.
15. Nadere vereisten volgen uit UN Regulation 160, zie ook Commission Delegated Regulation (EU) 2022/545 of 26 January 2022 supplementing Regulation (EU) 2019/2144 of the European Parliament and of the Council by laying down detailed rules concerning the specific test procedures and technical requirements for the type-approval of motor vehicles with regard to their event data recorder and for the type-approval of those systems as separate technical units and amending Annex II to that Regulation.
16. Preambule GSR onder 13, zie ook art. 5.3.1 UN R160.
17. Art. 6 lid 4 sub a GSR. Zie ook Gedelegeerde Verordening (EU) .../... van de Commissie van 26.1.2022 tot aanvulling van Verordening (EU) 2019/2144 van het Europees Parlement en de Raad met uitvoeringsbepalingen voor de specifieke testprocedures en technische voorschriften voor de typegoedkeuring van motorvoertuigen wat de gegevensrecorder voor incidenten betreft en voor de typegoedkeuring van die systemen als technische eenheden en tot wijziging van bijlage II bij die verordening (nog niet van kracht). Een nadere lijst met gegevens die dienen te worden geregistreerd is vastgelegd in Annex 4, table 1, van UN R160.
18. Premabule GSR onder 14.
19. Preambule GSR onder 14, Verordening (EU) 2016/679.
20. Zie tevens G.J. Ritsema van Eck en N.E. Vellinga, ‘The New Car Safety Rules of the GSR in light of the GDPR: An Unnecessarily Tangled Web’, European Journal of Law and Technology 2022/1, https://ejlt.org/index.php/ejlt/article/view/879.
21. G.J. Ritsema van Eck en N.E. Vellinga, ‘The New Car Safety Rules of the GSR in light of the GDPR: An Unnecessarily Tangled Web’, European Journal of Law and Technology 2022/1, https://ejlt.org/index.php/ejlt/article/view/879.
22. Preambule GSR onder 13: ‘Die recorders moeten de gegevens op zodanige wijze kunnen registreren en opslaan dat zij uitsluitend kunnen worden gebruikt door de lidstaten om de verkeersveiligheid te analyseren en de doeltreffendheid van de genomen specifieke maatregelen te evalueren, (...).’
23. Zie voor een uitgebreidere beschouwing van de GSR uit gegevensbeschermingsperspectief G.J. Ritsema van Eck en N.E. Vellinga, ‘The New Car Safety Rules of the GSR in light of the GDPR: An Unnecessarily Tangled Web’, European Journal of Law and Technology 2022/1, https://ejlt.org/index.php/ejlt/article/view/879.
24. Zie bijvoorbeeld ‘How connectivity is driving the future of the car’, Wired, www.wired.com/brandlab/2016/02/how-connectivity-is-driving-the-future-o….
25. Uiteraard zouden ook ethical hackers toegang kunnen verwerven. Kortheidshalve zal hier verder van hackers worden gesproken.
26. A. Greenberg, ‘Hackers Remotely Kill a Jeep on the Highway – With Me in It’, Wired 21 juli 2015, https://www.wired.com/2015/07/hackers-remotely-kill-jeep-highway.
27. A. Greenberg, ‘Hackers Remotely Kill a Jeep on the Highway – With Me in It’, Wired 21 juli 2015, https://www.wired.com/2015/07/hackers-remotely-kill-jeep-highway.
28. Overweging 26 GSR.
29. Overweging 26 preambule GSR: ‘De mogelijkheid om zonder toestemming toegang te krijgen tot de in het voertuig aanwezige gegevens en de software langs draadloze weg illegaal aan te passen, neemt toe als gevolg van de connectiviteit en automatisering van voertuigen. Om dergelijke risico's tegen te gaan, dienen VN-reglementen of andere reguleringsbesluiten inzake cyberveiligheid verplicht te worden toegepast zo spoedig mogelijk na de inwerkingtreding ervan.’
30. Art. 3.2.3 UN R155.
31. Art. 3.5 UN R156.
32. Art. 6.3 UN R155, art. 6.3 UN R 156.
33. Art. 7.2.2.1 UN R 155.
34. Zie voor een uitgebreidere analyse N.E. Vellinga, ‘Connected and vulnerable: cybersecurity in vehicles’, International Review of Law, Computers & Technology, 2022/2, https://doi.org/10.1080/13600869.2022.2060472.
35. Art. 5.1.1 onder (d) UN R155.
36. Zie uitgebreider: N.E. Vellinga, ‘Connected and vulnerable: cybersecurity in vehicles’, International Review of Law, Computers & Technology, 2022/2, https://doi.org/10.1080/13600869.2022.2060472.
37. Zie bijvoorbeeld UN R13 en UN R79.
38. Zie eveneens de Uitvoeringsverordening (EU) 2022/1426 van de commissie van 5 augustus 2022 tot vaststelling van uitvoeringsbepalingen voor Verordening (EU) 2019/2144 van het Europees Parlement en de Raad wat betreft uniforme procedures en technische specificaties voor de typegoedkeuring van het systeem voor geautomatiseerd rijden van volledig geautomatiseerde voertuigen.
39. Bijvoorbeeld HR 12 juni 1990, ECLI:NL:HR:1990:ZC8550, NJ 1991/29, VR 1990/158; HR 13 augustus 2005, ECLI:NL:HR:2005:AT7292, NJ 2005/542 en Hof Arnhem-Leeuwarden, 31 juli 2019, ECLI:NL:GHARL:2019:6122. Zie ook W.J.M. Weersma en N.J. Polak, De Wegenverkeerswet, Groningen, Djakarta: J.B. Wolters 1950, p. 41-43; J.B.H.M. Simmelink, Algemeenheden in het wegenverkeersrecht, Arnhem: Gouda Quint 1995, p. 69-75.
40. Verdrag van Wenen inzake het Wegverkeer, 8 november 1968.
41. §1a-1l Straβenverkehrsgesetz, Ordonnance n° 2021-443 en Décret n° 2021-873 (ter aanpassing van de Code de la Route).
42. Zie uitgebreider W.J.M. Weersma en N.J. Polak, De Wegenverkeerswet, Groningen, Djakarta: J.B. Wolters 1950, p. 43-46; J.B.H.M. Simmelink, Algemeenheden in het wegenverkeersrecht, Arnhem: Gouda Quint 1995, p. 75-77.
43. Zie uitgebreid N.E. Vellinga, Juridische aspecten van ALKS en ADS: Rapport in opdracht van het Ministerie van Infrastructuur en Waterstaat, Ministerie van Infrastructuur en Waterstaat 2022, beschikbaar via https://www.rijksoverheid.nl/documenten/rapporten/2022/08/26/juridische…, p. 26-27.
44. Zie art. 11 GSR.
45. Art. 2 lid 1 Uitvoeringsverordening (EU) 2022/1426 van de Commissie van 5 augustus 2022 tot vaststelling van uitvoeringsbepalingen voor Verordening (EU) 2019/2144 van het Europees Parlement en de Raad wat betreft uniforme procedures en technische specificaties voor de typegoedkeuring van het systeem voor geautomatiseerd rijden van volledig geautomatiseerde voertuigen (hierna: Uitvoeringsverordening).
46. Art. 2 lid 16 Uitvoeringsverordening: ‘(...) de specifieke bedrijfsomstandigheden waaronder een bepaald systeem voor geautomatiseerd rijden volgens het ontwerp moet werken, met inbegrip van onder meer beperkingen in verband met omgeving, geografie, tijdstip van de dag, en/of de vereiste aan- of afwezigheid van bepaalde verkeers- of wegkenmerken.’
47. Art. 2 lid 4: ‘(...) alle realtime operationele functies en tactische functies die nodig zijn om het voertuig te bedienen, met uitzondering van strategische functies zoals reisplanning en selectie van bestemmingen en routepunten, en met inbegrip van, zonder beperking, de volgende subtaken:
a) regeling van de zijdelingse bewegingen van het voertuig door middel van stuurhandelingen (operationeel);
b) regeling van de beweging van het voertuig in de lengterichting door middel van versnelling en vertraging (operationeel);
c) monitoring van de rijomgeving, door middel van de detectie, herkenning, en classificatie van objecten en gebeurtenissen, en voorbereiding van de reactie (operationeel en tactisch);
d) uitvoering van de reactie op objecten en gebeurtenissen (operationeel en tactisch);
e) planning van manoeuvres (tactisch);
f) verbetering van de waarneembaarheid door middel van verlichting, claxonneren, signalen, gebaren enz. (tactisch).’
48. Vergelijkbaar met SAE Level 4, zie SAE J3016, Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles, april 2021. Zie over aansprakelijkheidsvragen bijvoorbeeld R.W. de Bruin, ‘Verkeersrecht en Autonome Voertuigen: “zoek de fout” wordt problematisch’, opgenomen in deze aflevering onder nummer VR 2023/2.
49. Art. 1 Uitvoeringsverordening ADS.
50. Art. 2 lid 24 Uitvoeringsverordening ADS: ‘“bediener aan boord”: indien van toepassing op het veiligheidsconcept van het systeem voor geautomatiseerd rijden, een persoon die zich in het volledig geautomatiseerde voertuig bevindt en die:
a) het systeem voor geautomatiseerd rijden kan activeren, re-initialiseren en deactiveren;
b) het systeem voor geautomatiseerd rijden kan verzoeken een manoeuvre voor maximale risicobeperking te starten;
c) een door het systeem voor geautomatiseerd rijden voorgestelde manoeuvre kan bevestigen wanneer het voertuig stilstaat;
d) na een manoeuvre voor maximale risicobeperking, wanneer het volledig geautomatiseerde voertuig stilstaat, het systeem voor geautomatiseerd rijden kan verzoeken veilig een manoeuvre op lage snelheid uit te voeren die beperkt is tot 6 km/h, met voldoende resterende prestaties om het volledig geautomatiseerde voertuig naar een nabijgelegen, te prefereren locatie te doen uitwijken;
e) de planning van een route of stopplaatsen voor de gebruikers kan selecteren of wijzigen, of
f) in naar behoren vastgestelde situaties bijstand kan verlenen aan de passagiers van het volledig geautomatiseerde voertuig.
In bovengenoemde situaties mag de bediener aan boord het volledig geautomatiseerde voertuig niet besturen en moet het systeem voor geautomatiseerd rijden de dynamische rijtaak blijven uitvoeren (...).’
51. Art. 2 lid 25 Uitvoeringsverordening ADS: ‘“bediener voor een interventie op afstand”, indien van toepassing voor het veiligheidsconcept van het systeem voor geautomatiseerd rijden, een persoon (of personen) buiten het volledig geautomatiseerde voertuig die de taken van de bediener aan boord op afstand kan (kunnen) uitvoeren, mits het veilig is om dat te doen.
De bediener voor een interventie op afstand mag het volledig geautomatiseerde voertuig niet besturen en het systeem voor geautomatiseerd rijden moet de dynamische rijtaak blijven uitvoeren (...).’
52. Zie voor een uitgebreidere bespreking: N.E. Vellinga, Een verkenning van het juridisch kader voor de ADS in enkele EU Lidstaten en Groot-Brittannië: Rapport in opdracht van het Ministerie van Infrastructuur en Waterstaat, Ministerie van Infrastructuur en Waterstaat 2022, binnenkort beschikbaar online.
53. §1d Abs. 3 Straβenverkehrsgesetz.
54. Law Commission of England and Wales en Scottish Law Commission, Automated Vehicles: joint report, 25 januari 2022, HC 1068 SG/2022/15, p. 135 e.v.
55. Art. 121-3 Code Pénal luidt: ‘Il n'y a point de crime ou de délit sans intention de le commettre. Toutefois, lorsque la loi le prévoit, il y a délit en cas de mise en danger délibérée de la personne d'autrui. Il y a également délit, lorsque la loi le prévoit, en cas de faute d'imprudence, de négligence ou de manquement à une obligation de prudence ou de sécurité prévue par la loi ou le règlement, s'il est établi que l'auteur des faits n'a pas accompli les diligences normales compte tenu, le cas échéant, de la nature de ses missions ou de ses fonctions, de ses compétences ainsi que du pouvoir et des moyens dont il disposait. Dans le cas prévu par l'alinéa qui précède, les personnes physiques qui n'ont pas causé directement le dommage, mais qui ont créé ou contribué à créer la situation qui a permis la réalisation du dommage ou qui n'ont pas pris les mesures permettant de l'éviter, sont responsables pénalement s'il est établi qu'elles ont, soit violé de façon manifestement délibérée une obligation particulière de prudence ou de sécurité prévue par la loi ou le règlement, soit commis une faute caractérisée et qui exposait autrui à un risque d'une particulière gravité qu'elles ne pouvaient ignorer. Il n'y a point de contravention en cas de force majeure.’
56. N.E. Vellinga en W.H. Vellinga, ‘Enkele verkeersrechtelijke aspecten van toelating van (deels) zelfrijdende of autonome auto’s tot het wegverkeer’, VR 2015/35.
57. EHRM 25 maart 2021, 35983/14 (Smiljanić v. Croatia), r.o. 69. Zie eveneens EHRM 25 juni 2019, 41720/13 (Nicolae Virgiliu Tănase v. Romania), r.o. 135.
58. Brief betreffende ontwikkelingen voertuigautomatisering van de Minister van Infrastructuur en Waterstaat aan de Tweede Kamer, 1 juli 2022, beschikbaar via https://open.overheid.nl/repository/ronl-da9f456f0e6a0eab85c81ecadde612….